若手研究者紹介:076
機械工学専攻 中尾・長藤・趙・木崎研究室 趙 漠居 特任講師

【経歴】
2013年3月 東京大学 工学部機械情報工学科 卒業
2015年3月 東京大学 大学院情報理工学系研究科 知能機械情報学専攻 修了
2018年3月 東京大学 大学院情報理工学系研究科 知能機械情報学専攻 博士課程修了、博士(工学)
2015年4月-2018年3月 日本学術振興会特別研究員 (DC1)
2018年4月-2021年3月 東京大学 大学院情報理工学系研究科 知能機械情報学専攻 特任助教
2021年4月-現在 東京大学 大学院工学系研究科 機械工学専攻 特任講師
【研究について】
私はこれまでに機械工学、電子電気工学、制御工学、情報工学などの知識を横断的に駆使し、社会に貢献できるロボットの研究に注力してきました。その中でも、ロボット行動の多様性を目指すべく、多リンク型飛行ロボットという新しい概念の実現に着目し、ハードウェア基盤要素から知能行動創成まであらゆる階層の研究課題に網羅的に取り組んできました(図1)。
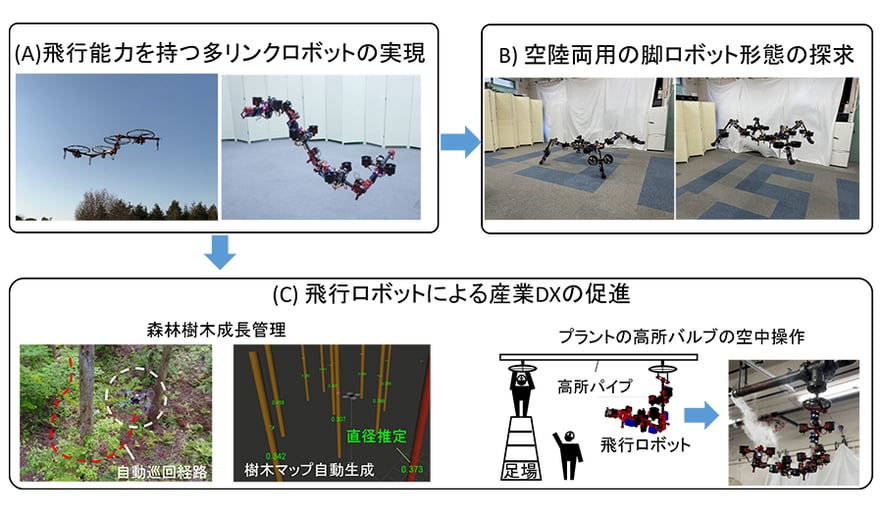 図1:多リンクモデルを基軸にした飛行ロボットの研究開発
図1:多リンクモデルを基軸にした飛行ロボットの研究開発
A) 飛行能力を持つ多リンクロボットの実現
一般的にドローンと呼ばれる機体とは一線を画すような回転翼を内蔵するリンクモジュールという新しい身体構成法を提案し、多リンク構造を有する飛行ロボットの機体設計と開発に取り組んできました(図1(A))。その上で、流体力学や機械力学、材料力学といった機械工学の“四力”知識を駆使し、多リンク系の空中力学モデルを明らかにしました。さらに古典制御からモデル予測制御までのさまざまな制御理論を横断的に応用し、関節運動を含んだ空中での高次元の動作検証を実機ベースで行い、多リンク型飛行ロボット特有の空中変形動作を実現しました。
B) 空陸両用の脚ロボット形態の探求
空中ドメインだけでなく、複数のドメインで行動できるロボット形態の模索にも注力しています。そこで、今まで培ってきた飛行能力を有するリンクモジュールを基軸に、空陸両用の四足ロボットという新しい形態を提案しています(図1(B))。そのうえで、地上歩行や空中飛行の異なる移動様式に適用できる汎用的な制御手法の構築と実証実験を進めてきており、現在では実機による空陸混合の移動能力を実現しています。目下四肢の手先を用いた多彩な物体・環境操作の知能行動生成法に取り込んでいます。
C) 飛行ロボットによる産業DXの促進
社会実装への展開として産業DXの促進にも取り組んでおり、とりわけ飛行ロボットによる高所作業に着目しています。その一例として、大規模な森林環境での樹木成長記録を目的とした自律探索システムを構築し(図1(C)左)、樹木の座標と直径の推定と記録を記録したマップの実時間更新を実現しています。また、近年では工場や化学プラントのDXが強く求められています。独自の多リンク型飛行ロボットによる高所バルブの自動開閉動作を実現しており(図1(C)右)、プラントDX実現における飛行能力の画期的な価値を示しました。
【今後の抱負】
近年、ドローンをはじめとする飛行ロボットは急速な普及を遂げ、点検や農業、消防などさまざまな場面で活躍するようになりました。しかし、その多くは飛行ロボットを“目”として利用しています。一方、今開発を進めている多リンク系飛行ロボットは、空中操作能力により飛行している“手”として活用することができます。今後は飛行している“手”を用いた、より高次元な空中行動を実現することで、サステナブルな社会に貢献できるロボットの価値創成を推進していきます。
【URL】
趙 研究室 (DRAGON Lab):https://www.dragon.t.u-tokyo.ac.jp/ja/
中尾・長藤・趙・木崎研究室:https://www.hnl.t.u-tokyo.ac.jp/
Flying Dragon Robot:https://spectrum.ieee.org/flying-dragon-robot-transforms-itself-to-squeeze-through-gaps
Aerial Dragon Robot:https://spectrum.ieee.org/dragon-robot-flying-manipulator
A Flying Robotic SPIDER:https://spectrum.ieee.org/flying-robot-spider
※所属・職位は取材当時のものです。
丁友会RoboTechが、ABUアジア・太平洋ロボットコンテスト2018 ベトナム・ニンビン大会において、ABUロボコン大賞、ベスト4およびトヨタ賞を受賞されました

若手研究者紹介:白松(磯口)知世 准教授