
若手研究者紹介:070
航空宇宙工学専攻 土屋研究室 森田 直人 助教

【経歴】
2015年3月 早稲田大学 基幹理工学部 機械科学・航空学科 卒業
2017年3月 東京大学 大学院工学系研究科 航空宇宙工学専攻 修士課程修了
2020年3月 東京大学 大学院工学系研究科 航空宇宙工学専攻 博士後期課程修了 博士(工学)
2020年4月 東京大学 大学院工学系研究科 航空宇宙工学専攻 助教
【研究について】
近年ドローンの爆発的な普及により、無人航空機の存在はより身近になり、社会における無人航空機の役割も大きくなってきています。無人航空機に関する技術の発展により、昼夜を問わず飛行を続けることができる機体の実現が見えてきました。特に天気の影響を受けにくくなる高度20km付近を常時滞空する無人航空機をHAPS (High-Altitude Pseudo-Satellite もしくはHigh-Altitude Platform Station) と呼び、多くの企業が開発競争を行っています。私はこのHAPSシステムの小型化・低コスト化を目指し、研究室レベルで開発・運用できる機体や制御手法を、空気力学解析や軌道解析を組み合わせた最適化技術や構造・運動連成解析等を用いて研究しています。
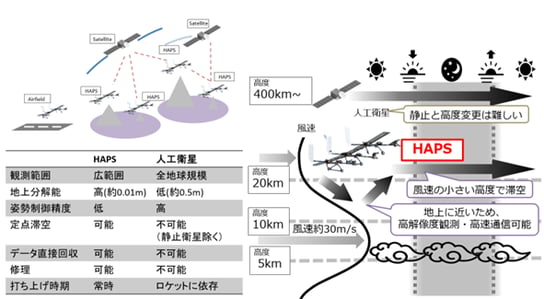
図1:人工衛星と比較したHAPSの特徴
A)能動空力弾性制御を用いた複数カナード機の高精度飛行制御および突風荷重軽減制御
私はHAPSの小型化を実現するために、柔らかく軽い主翼を能動的な制御によって飛行可能にする技術に着目し、シミュレーションと飛行実験を行いながら研究を行っています。研究に用いている機体は制御性能を向上させつつ主翼を能動的に変形させるため、3枚の先尾翼を備えた、世界的に見ても他に例のない機体となっています。MEMSセンサやひずみゲージ等を組み合わせて、安価・高精度に機体の姿勢や構造変位を計測するアルゴリズムを実装し、それを用いた飛行中の機体変形制御や突風荷重の軽減制御について研究を行っています。
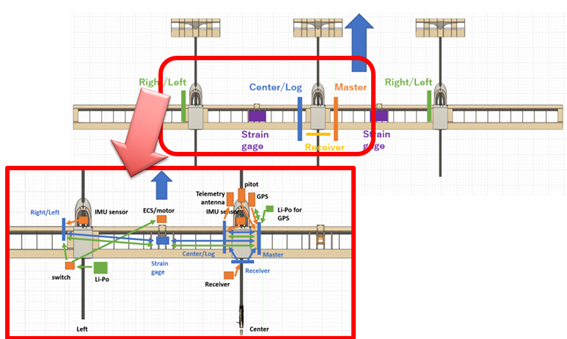
図2:機体構成と各種センサの配置
B)複合領域最適化のアルゴリズム研究と実機への応用
航空機の開発において、計算流体力学や構造解析・運動シミュレーションは航空機開発に必須といっても過言ではありません。これらの解析を組み合わせて効率的に最も良い機体形状を探索するのが複合領域最適化です。私は比較的低計算コストな計算流体力学であるパネル法や構造解析・軌道最適化技術を組み合わせて効率的に複合領域最適化をおこなうアルゴリズムを研究・開発し、前述のHAPS実験機や極超音速航空機・マルチコプタやハイブリッド機体の設計最適化に応用して、設計における知見を探り出しています。
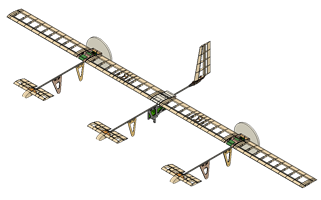
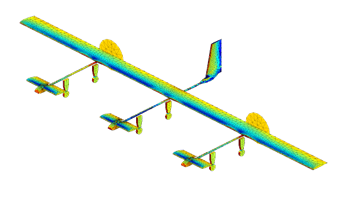
図3:機体設計図とパネル法による空力解析結果
【教育活動について】
A)に示した能動空力弾性制御の研究は実際に実験機を製作し飛行試験を行っています。この機体の設計・製作に対し、HAPSプロジェクトとして航空宇宙工学科を中心とした有志の学生が参加しています。座学として航空宇宙工学を学ぶだけでなく、実機における構造や回路・制御則の製作を通して一層の教育効果を生むことができます。大規模なシステムを多くの学生とともに取り組むことで研究と教育の橋渡しを行い、他の追随を許さない独創的な研究ができると考えています。
 図4:飛行試験の様子
図4:飛行試験の様子
【今後の抱負】
2024年の夏に高度150m以下の低高度における24時間継続飛行成功に向けて研究・活動を行っています。実際に機体を作っていると予期できない事象にハッとさせられることも多く、日々楽しく研究活動を行っています。将来、HAPSが身近な存在となり、豊かな社会に貢献できるよう精進していきます。
【URL】
土屋研究室:https://www.flight.t.u-tokyo.ac.jp/
HAPSプロジェクト:https://ut-hapsrg.studio.site
若手研究者紹介: 山田崇恭 准教授

若手研究者紹介:富井 直輝 助教
