
精密工学専攻 池勇勳さんが、第14回 計測自動制御学会システムインテグレーション部門講演会(SI2013)にて、2014年度計測自動制御学会学術奨励賞研究奨励賞を受賞されました。
<受賞された研究について>
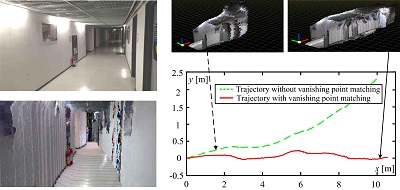
本研究は、屋内環境における移動ロボットのための地図生成に関するものです。特徴抽出とマッチング難しく、地図生成が困難である単調な環境において正確な地図生成のために、RGB-Dセンサから取得した画像から消失点を抽出し、EKFと呼ばれる拡張カルマンフィルタに基づくマッチングを行うことで空間的に位置ずれのない、正確な三次元環境モデルの生成を実現しました。
この成果のため、建物の中の廊下のように形状の変化が少なく、幾何特徴がほぼ存在しない環境においても、比較的に簡単な作業で位置ずれの小さい精密な地図生成が可能になり、将来サービスロボットなどを運用する多くの場所でこの成果が活用されるでしょう。
{kind=link}
<今後の抱負・感想>
今回の受賞を大変光栄に思います。研究のご指導をいただきました淺間一教授、山下淳准教授ならびに研究室の方々にこの場をお借りしてお礼申し上げます。今後ともこの成果を土台にして、より真摯に研究に励んでいきたいと思います。
共有
精密工学専攻 藤井 浩光さんが 第16回 計測自動制御学会システムインテグレーション部門講演会において 部門若手奨励賞 を受賞されました
![]()
精密工学専攻 藤井 浩光さんが 第16回 計測自動制御学会システムインテグレーション部門講演会において 部門若手奨励賞 を受賞されました
2016/01/27
精密工学専攻 河野仁さんらが 第16回公益社団法人計測自動制御学会システムインテグレーション部門講演会に於いて SI2015優秀講演賞 を受賞されました
![]()
精密工学専攻 河野仁さんらが 第16回公益社団法人計測自動制御学会システムインテグレーション部門講演会に於いて SI2015優秀講演賞 を受賞されました
2016/01/27
精密工学専攻 禹 ハンウルさん(D2)らが第17回計測自動制御学会システムインテグレーション部門講演会 において優秀講演賞を受賞されました
![]()
精密工学専攻 禹 ハンウルさん(D2)らが第17回計測自動制御学会システムインテグレーション部門講演会 において優秀講演賞を受賞されました
2017/02/19