
Yonghoon Ji, Department of Precision Engineering, won Academic research award at The 14th SICE System Integration Division Annual Conference.
< About awarded research >
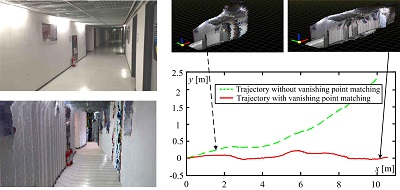
Our study deals with a map building for a mobile robot in an indoor environment. In order to build accurate 3D environment model, we proposes extended Kalman filter-based vanishing point matching algorithm by using RGB-D sensor in a monotonic environment where robust features for matching are not extracted.
The proposed system can simplify the task of the map building process in a place which has no robust features such as a corridor environment. Therefore, we are hoping the scheme will utilize for many places where service robots are operated.
< Comments >
I am extremely honored to receive this award. I would like to thank my supervisors, Professor Hajime Asama, Associate Professor Atsushi Yamashita, and laboratory members. I will continue my research based on this accomplishment.