発表のポイント
◆垂直方向の圧力とせん断応力の分布を同時に検知可能な光学式フレキシブル圧力センサシートの開発に成功した。◆この圧力センサシートは、フレキシブル面光源、フレキシブル感圧ゴムシート、フレキシブルイメージャーの3層から構成されており、総厚さは1.5ミリメートルである。
◆開発したセンサシートは、フレキシブルで曲面への実装が可能であるため、今後、ヘルスケアやロボットの電子皮膚への応用などが期待される。
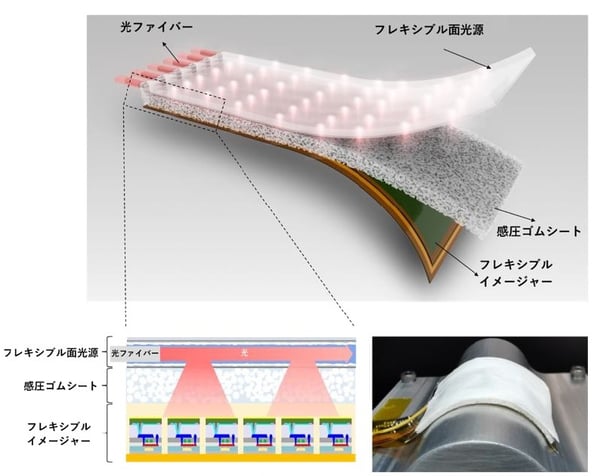
光学式フレキシブル圧力センサシートの構造図
発表概要
東京大学大学院工学系研究科のHaoyang Wang大学院生、李成薫講師、横田知之准教授、染谷隆夫教授らは、垂直方向の圧力とせん断応力(注1)の分布を同時に検知可能な光学式フレキシブル圧力センサシートの開発に成功しました。この圧力センサシートは、フレキシブル面光源、フレキシブル感圧ゴムシート、フレキシブルイメージャーの3層から構成されており、圧力が加わることによる光強度分布の変化を計測することで、垂直方向の圧力とせん断応力の分布を計測することができます。開発した圧力センサシートでは、垂直方向の圧力とせん断応力の圧力をそれぞれ1キロパスカルと0.6キロパスカルの大きさまで検出することに成功しました。今後、ヘルスケアやロボットの電子皮膚への応用などが期待されます。
本研究成果は、2023年9月8日付で米国科学誌「Science Advances」のオンライン版で公開されました。
発表内容
〈研究の背景〉
近年、IoT(モノのインターネット)やウェアラブルデバイスなどの発展に伴い、日常生活における人々の行動履歴や健康状態などのデータ収集や解析が可能になりつつあります。中でも、圧力センシングは、手袋型のウェアラブルデバイスへ応用されており、医療や介護、スポーツなどの分野において、さまざまな作業における腕や指の行動を正確に計測しデジタル化するために利用されはじめています。従来の圧力センサの多くは、垂直方向の圧力のみを検知可能ですが、さらにせん断応力を検知できるようになることで、ロボティクスやヒューマンマシンインターフェース(HMI)、神経工学、ヘルスケアなど幅広い分野への応用が期待されます。このような3軸方向が検知可能な圧力センサの中で、光学式圧力センサは、多点での計測、高空間分解能、高耐久性などの利点を備えているため特に注目されています。しかし、従来の光学式圧力センシングシステムは、複雑な光学系を必要とするため、素子自体が固く、デバイスが厚いことから、柔らかい対象や曲面などへの実装が難しいという課題がありました。
〈研究の内容〉
今回、研究グループは、フレキシブル面光源、フレキシブル感圧ゴムシート、フレキシブルイメージャーの3層を積層することで、垂直方向の圧力とせん断応力の分布を同時に検知可能な光学式フレキシブル圧力センサシートの開発に成功しました(図1)。面光源から出た光は、感圧ゴムシート内を通過したのちに、フレキシブルイメージャーで光の強度分布が検出されます。
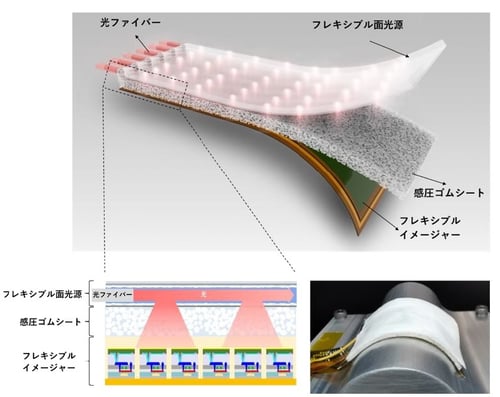
図1:光学式フレキシブル圧力センサシートの構造図
フレキシブル面光源は、ポリジメチルシロキサン(PDMS)を光導波路(注2)に用いており、その表面に酸化チタンナノ粒子を分散させた拡散層、および銀を反射層として成膜することで、均一な面光源を実現しています。開発した圧力センサシートは、圧力が加わることで光強度分布が変化し、この光強度分布から垂直方向の圧力とせん断応力の分布を計算することができます。また、フレキシブル感圧ゴムシートとして、厚さ0.8ミリメートルの多孔質なPDMSシートを用いることでセンサの感度を向上させることに成功しました。開発した圧力センサシートでは、垂直方向の圧力に対して最小で1キロパスカル、最大で360キロパスカルまでの圧力を検知することができました。また、せん断応力に関しても最小で0.6キロパスカル、最大で100キロパスカルの圧力まで検知することに成功しました。さらに、5ミリメートルの格子状に配置した6×8のセンサアレイを用いることで、垂直方向の圧力とせん断応力の圧力分布を同時に計測できることを実証しました(図2)。
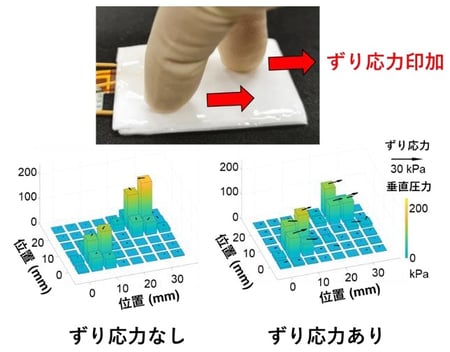
図2:垂直方向の圧力とせん断応力の分布の同時計測
〈今後の展望〉
今回開発した光学式フレキシブル圧力センサシートは、垂直方向の圧力とせん断応力の圧力分布を同時に計測することができます。開発した圧力センサシートは、フレキシブルで曲面への実装が可能であるため、今後、ロボットアームへの実装といった電子皮膚への応用のほか、手すりに実装することで、病院などでの歩行中に手すりにかかる力具合を定量的に評価するなど、リハビリやヘルスケア方面での活用が期待されます。
発表者
東京大学大学院工学系研究科
染谷 隆夫(教授)
横田 知之(准教授)
李 成薫(講師)
Haoyang Wang(博士課程)
論文情報
〈雑誌〉Science Advances (9月8日付、オンライン版)
〈題名〉An Optical-based Multipoint 3-Axis Pressure Sensor with a Flexible Thin-film Form
〈著者〉Haoyang Wang, Wenqing Wang, Jae Joon Kim, Chunya Wang, Yan Wang, Binghao Wang, Sunghoon Lee, Tomoyuki Yokota, Takao Someya
〈DOI〉10.1126/sciadv.adi244
〈URL〉https://www.science.org/doi/10.1126/sciadv.adi2445
研究助成
本研究は、科研費「基盤研究(S)(課題番号:22H04949)」の支援により実施されました。
用語解説
(注1)せん断応力
面と平行方向の力をかけたときに、その面にすべらせるように作用する応力。
(注2)光導波路
物質の光学特性の違いを利用して、光が伝搬するような光の伝送路。
プレスリリース本文:PDFファイル
Science Advances:https://www.science.org/doi/10.1126/sciadv.adi2445
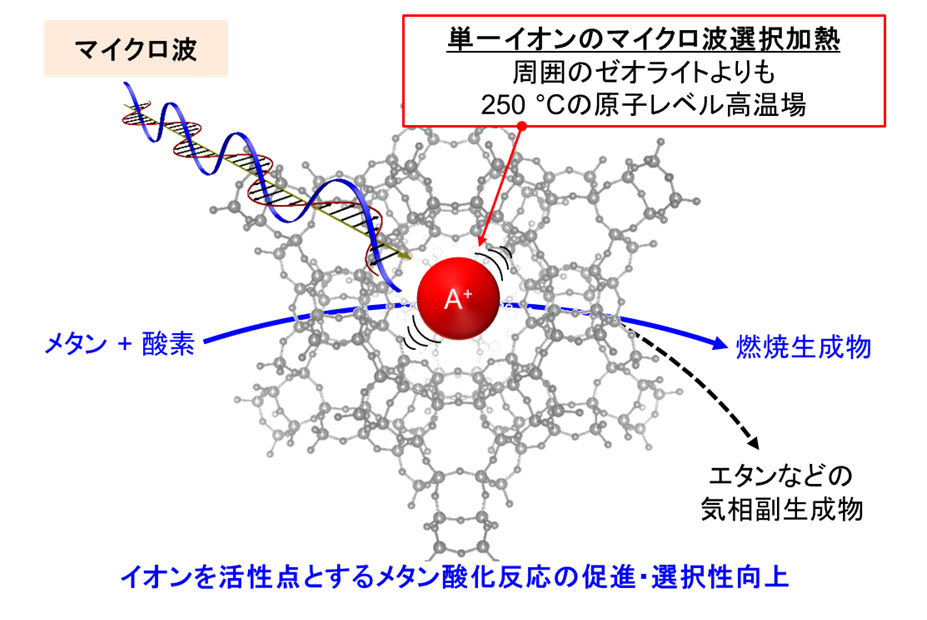
マイクロ波によって触媒活性点を原子レベルで選択加熱 ―熱エネルギー集中による触媒システムの省エネ化に期待―
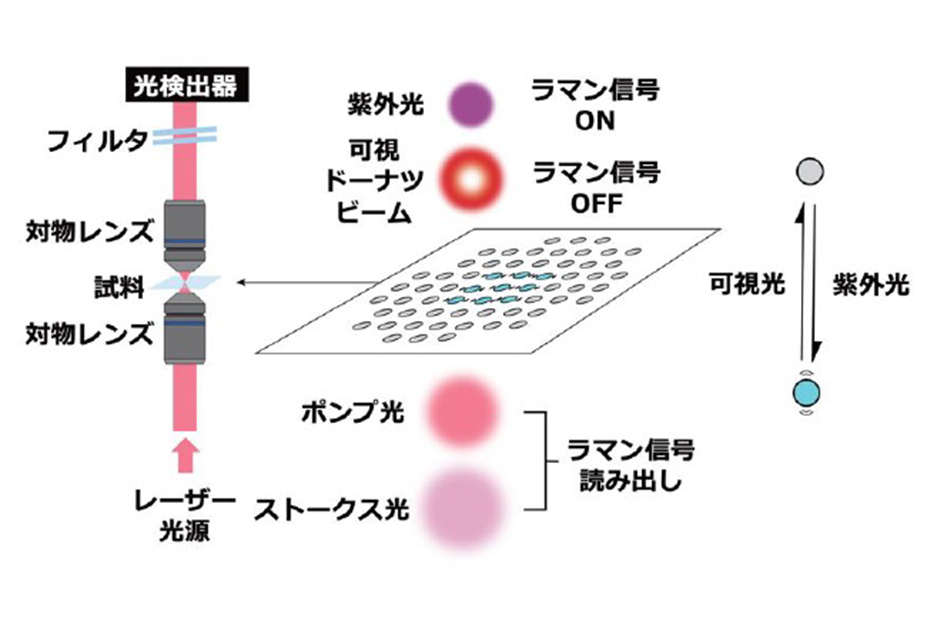
光スイッチングラマンプローブによる超解像イメージング ―生体内の複雑かつ微細な構造を観察する手法を開拓―