1.発表者:
新井 史人(東京大学 大学院工学系研究科 機械工学専攻 教授)
谷口 雄大(東京大学 大学院工学系研究科 機械工学専攻 修士課程)
原田 香奈子(東京大学 大学院医学系研究科 疾患生命工学センター 准教授)
光石 衛(研究当時:東京大学 大学院工学系研究科 機械工学専攻 教授、
現所属:独立行政法人大学改革支援・学位授与機構 理事)
相原 一(東京大学 大学院医学系研究科 眼科学教室 教授)
2.発表のポイント:
◆高感度な水晶振動式力センサ(注1)を搭載した眼球モジュールを有する眼内手術手技評価用の患者シミュレータを開発
◆微小な鉗子操作による網膜への接触力を高精度に計測
◆手術技能の向上に向けた、鉗子操作の定量的な評価が可能
3.発表概要:
東京大学大学院工学系研究科機械工学専攻の新井史人教授、谷口雄大大学院生らの研究グループは、繊細な技術を必要とする眼疾患に対する網膜硝子体手術(注2)の一つである内境界膜剥離術(注3)の練習用に、水晶振動式力センサとその他パーツから構成される力計測機構を搭載した眼球モジュールを有する眼内手術手技評価用の患者シミュレータを開発した。
網膜硝子体手術では眼内で鉗子が網膜表面に接触するため、網膜に損傷を与えないよう繊細な鉗子操作が求められる。しかし、術中に鉗子が網膜へ接触しているときの反力の感覚はほとんどなく、非熟練医が鉗子の適切な操作を習得するには十分な練習を要する。そこで、手術技能の習得を促進するため、鉗子の網膜への接触力を計測するための力センサを搭載した眼球モジュールを有する患者シミュレータを開発した。これにより、術者が鉗子の操作感覚を定量化することが可能となる。
本研究で開発した眼球モジュールは、力の分解能として0.22ミリニュートンを有する。手術練習時における鉗子の網膜モデルへの接触力は、数~数百ミリニュートンで、これを鮮明に捉えることに成功した。この成果によって、熟練度の異なるさまざまな術者の手術技能が定量化され、そのデータ分析をもとに鉗子操作の熟練度を定量的に提示することが可能になると期待される。
本研究成果は、2022年7月5日(米国東部夏時間)に「Microsystems & Nanoengineering」のオンライン版に掲載された。
4. 発表内容:
眼内手術では、局所麻酔により手術中に患者に声が聞こえるため、手術中の教育が難しいといわれている。また、極力眼球に負荷を与えないように鉗子を丁寧かつ繊細に操作することが求められる。しかし、鉗子の操作感を定量的に言い表すことができず、非熟練医にとって手術技能を習得することが難しい。このような課題に対し、我々は手術手技を定量評価するためのセンサが内蔵された眼球モジュールを有するバイオニックアイ(図1a,注4)とよばれる眼内手術手技評価用の患者シミュレータの研究開発を行っている。今回、我々は網膜硝子体手術の一つに分類される内境界膜剥離術を対象とした。この手術では、黄斑円孔(注5)や黄斑前膜(注6)と呼ばれる疾患に対して、眼球の奥の網膜最表層に存在する内境界膜と呼ばれる厚さ約3マイクロメートルの薄膜(図1b)が、直径約4ミリメートルの範囲にわたって剥離される(図1c)。その薄さゆえに内境界膜を鉗子で掴む際に網膜に過剰な負荷が加えられる可能性があり、それを防ぐために眼科医は適切な操作加減を把握しておかなければならない。
したがって、練習段階において非熟練医が自身の鉗子操作によって、どの程度の負荷が網膜モデルにかかっているのか定量的に捉えられるようにすべく、水晶振動式力センサを内蔵した力計測機構を有する眼球モジュールを開発した(図2a)。我々は、患者側である眼球モジュールにセンサを付けることで、患者への影響という視点で手術手技を評価する方式をとった。この力計測機構は、平行平板構造を有する起歪体とその下に水晶振動式力センサが接する形で構成されている。まず起歪体は上下の平行平板に支えられたトランポリンのような構造をしており、上部から鉗子による一定の接触力を受けた際に、その接触位置に依存せず一定の変位を下側の力センサに伝える役割を有する。内境界膜剥離術では鉗子の接触は剥離範囲である直径約4ミリメートルに及ぶので、その範囲において力の感度を均一化するという目的がある。次に水晶振動式力センサ(図2b)は、センシングの役割を担う水晶振動子層と、その上下の厚さの異なる水晶のカバー層の3層構造から構成されている(図2c)。このセンサは梁型の構造をしており、センサの上部に力が与えられた際に、拡大された力がセンシング部分に当たる水晶振動子層の電極に加えられる。水晶振動式力センサの特徴として、高感度、高剛性、力の計測レンジが広いといった点が挙げられる。センサを眼球モジュールに組み込む際にある程度大きな初期荷重がセンサに与えられた状態でも、鉗子の接触力のような微小な力を計測できる。このため、センサ組み込み時の位置調整が容易であるといった利点を有している。
実際に製作した眼球モジュールは、力分解能が0.22ミリニュートンに相当する。術中の鉗子の接触力はおよそ数~数十ミリニュートンに相当するとされており、したがってこれを検知するのに十分な性能を有していることがわかった。続いて、この眼球モジュールを用いて、内境界膜剥離術の練習を行い、その際の鉗子の網膜部接触力を評価した。その結果、一連の鉗子操作を定量的な信号として捉えることに成功した。まず内境界膜モデルを掴むために鉗子を網膜モデルに押し込んだ際に正の荷重が生じ、次に掴んだ内境界膜モデルを剥離した際に負の荷重が生じることがわかった(図3a)。つまり、鉗子による内境界膜モデルの剥離操作によって、網膜には押し込む力だけでなく、引っ張られる力が作用していることがわかった。また、術中に繰り返されるこの鉗子操作に伴う力信号について、押し込みの際の荷重の平均値と分散が、剥離の際の荷重よりも大きく、広いことがわかった(図3b)。以上のように、鉗子操作の特徴を高い精度で、定量的な力情報として取得することができた。
この成果により、さまざまな術者による鉗子操作を定量的データとして捉えることが可能となる。今後は熟練度の異なるさまざまな被験者からデータを大量に取得し、その中で熟練度に関連しうる特徴量を抽出することを目指す。鉗子操作の熟練度を定量的に提示することで、手術技能の向上効果が生み出されると期待される。
5.発表雑誌:
雑誌名:「Microsystems & Nanoengineering」(オンライン版:7月5日)
論文タイトル:A Force Measurement Platform for a Vitreoretinal Surgical Simulator Using an Artificial Eye Module Integrated with a Quartz Crystal Resonator
著者:Yuta Taniguchi*, Hirotaka Sugiura, Toshiro Yamanaka, Shiro Watanabe, Seiji Omata, Kanako Harada, Mamoru Mitsuishi, Tomoyasu Shiraya, Koichiro Sugimoto, Takashi Ueta, Kiyohito Totsuka, Fumiyuki Araki, Muneyuki Takao, Makoto Aihara, and Fumihito Arai
DOI番号:10.1038/s41378-022-00417-8
アブストラクトURL:https://www.nature.com/articles/s41378-022-00417-8
6.研究グループの構成:
谷口 雄大(東京大学 大学院工学系研究科 機械工学専攻 修士課程)
杉浦 広峻(東京大学 大学院工学系研究科 機械工学専攻 助教)
山中 俊郎(東京大学 大学院工学系研究科 機械工学専攻 特任研究員)
渡邉 史朗(東京大学 大学院工学系研究科 機械工学専攻 博士課程)
小俣 誠二(熊本大学 大学院先端科学研究部 助教)
原田 香奈子(東京大学 大学院医学系研究科 疾患生命工学センター 准教授)
光石 衛(研究当時:東京大学 大学院工学系研究科 機械工学専攻 教授、
現所属:独立行政法人大学改革支援・学位授与機構 理事)
白矢 智靖(東京大学 大学院医学系研究科 眼科学教室 講師)
杉本 宏一郎(東京大学 大学院医学系研究科 眼科学教室 助教)
上田 高志(東京大学 大学院医学系研究科 眼科学教室 特任講師)
戸塚 清人(研究当時:東京大学 大学院医学系研究科 眼科学教室 助教、現所属:西葛西・井上眼科病院 副院長)
荒木 章之(東京大学 大学院医学系研究科 眼科学教室 助教)
高尾 宗之(東京大学 大学院医学系研究科 眼科学教室 非常勤講師)
相原 一(東京大学 大学院医学系研究科 眼科学教室 教授)
新井 史人(東京大学 大学院工学系研究科 機械工学専攻 教授)
7.用語解説:
(注1)水晶振動式力センサ:
水晶は電荷を与えると歪みが生じる性質を持つ(逆圧電効果)。これを利用し、薄い水晶片の両面に電極を成膜して発振回路に繋ぐと、高周波で非常に安定的に振動する(水晶振動子)。水晶振動子は外力が与えられると比例して共振周波数が変化する性質を持ち、水晶振動子に水晶の保護層を接合させて強度を上げることで力センサとして用いられる。
(注2)網膜硝子体手術:
ヒトの眼球内の大部分は、硝子体と呼ばれる99%が水のゲル状のもので満たされ、眼球の奥において網膜の一部と接している。これらの組織全般に関する疾患に対し行われ、眼科治療の中でも難度の高い手術の一つである。
(注3)内境界膜剥離術:
網膜硝子体手術の一つ。眼球の奥の網膜最表層に存在する内境界膜と呼ばれる厚さ3マイクロメートルほどの薄膜を、黄斑円孔や黄斑前膜と呼ばれる疾患に対し、それを中心におよそ直径4ミリメートルの範囲にわたって剥離する。
(注4)バイオニックアイ:
眼科手術手技評価用の患者シミュレータ。組み込まれている眼球モジュールは、ヒトの眼球の解剖学的構造、機械的特性を模擬しており、手術技能を定量評価するためのセンサが内蔵されている。緑内障手術や内境界膜剥離術に対応した眼球モジュールに適宜交換可能であり、利用者は本番さながらの練習を定量的なフィードバック付きで繰り返し行うことが可能となる。現在、三井化学株式会社により実用化されている。https://jp.mitsuichemicals.com/jp/special/bionic-eye/index.htm
(注5)黄斑円孔:
ヒトの眼球の奥には黄斑と言われる視野の中心機能を担う領域が存在する。黄斑の中でも中心窩と呼ばれる中央の部分は薄いため、加齢や外傷、炎症性疾患に伴い穴が開くことがあり、この疾患を黄斑円孔と呼ぶ。黄斑円孔により視力低下がきたされるため、症状の回復には円孔を閉じる必要がある。その妨げとなっているのが内境界膜であり、円孔周りの膜を剥離することによって網膜が閉じる。
(注6)黄斑前膜:
加齢に伴い硝子体を覆う皮質の一部が黄斑部の上部に取り残され、肥大化することがある。この疾患を黄斑前膜といい、視力低下を来す。症状改善のために内境界膜とともに黄斑前膜を剥離して取り除く必要がある。
8.添付資料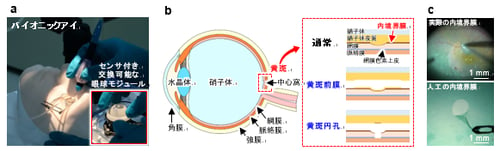 図1.内境界膜剥離術の概要。a:眼内手術手技評価用の患者シミュレータであるバイオニックアイ。手術に応じて眼球モジュールが交換可能。b:眼球構造と黄斑部で生じる疾患の特徴。c:実際の人眼の内境界膜と、バイオニックアイの眼球モジュールで再現された人工の内境界膜の剥離の様子。
図1.内境界膜剥離術の概要。a:眼内手術手技評価用の患者シミュレータであるバイオニックアイ。手術に応じて眼球モジュールが交換可能。b:眼球構造と黄斑部で生じる疾患の特徴。c:実際の人眼の内境界膜と、バイオニックアイの眼球モジュールで再現された人工の内境界膜の剥離の様子。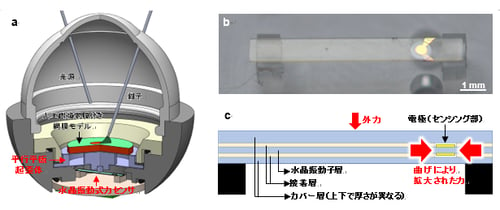 図2.内境界膜剥離術練習における力計測の概要。a:力計測機構が組み込まれた眼球モジュールの構造。b:水晶振動式力センサ。c:水晶振動式力センサの構造と力計測の仕組みの概要。
図2.内境界膜剥離術練習における力計測の概要。a:力計測機構が組み込まれた眼球モジュールの構造。b:水晶振動式力センサ。c:水晶振動式力センサの構造と力計測の仕組みの概要。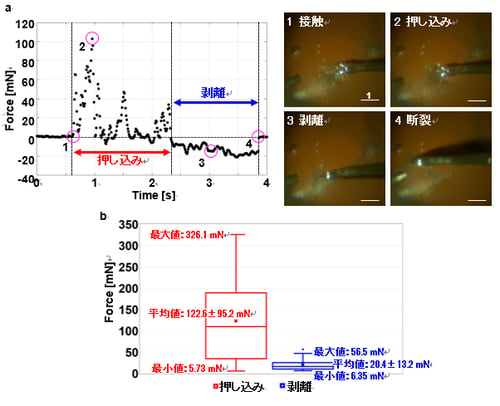 図3.内境界膜剥離術シミュレーション時の力計測結果。a:一連の鉗子操作に伴う力の波形。 b:各々の一連の鉗子操作における押し込み、剥離時の力の最大値の分布。
図3.内境界膜剥離術シミュレーション時の力計測結果。a:一連の鉗子操作に伴う力の波形。 b:各々の一連の鉗子操作における押し込み、剥離時の力の最大値の分布。
プレスリリース本文:PDFファイル
Microsystems & Nanoengineering:https://www.nature.com/articles/s41378-022-00417-8
眼科手技を模擬した眼科手術シミュレータの開発 ~マイクロフックを用いた緑内障手術用眼球モデルの開発に成功~
眼科手技を模擬した眼科手術シミュレータの開発~網膜硝子体手術用眼球モデルの開発と計測システムの統合に成功~