
2015年12月7日、精密工学専攻 徐彬斌さん、サーサク パトハックさん、藤井浩光さん、山下淳 准教授、淺間一 教授らが、The 6th International Conference on Advanced Mechatronics (ICAM2015)に於いて ICAM 2015 Honorable Mentionを受賞されました。

<受賞された研究・活動について>
近年、社会インフラの老朽化は深刻な問題となっています。安全のために定期的な検査が必要不可欠ですが、橋梁など高所の検査では人手での検査は危険であるため飛行ロボットの利用が期待されています。飛行ロボットを用いた目視検査では、検査の効率化のため360度の視野がある全方位カメラなどの利用が有効です。しかし、カメラ映像中でロボット自体が視野を遮ることで視野が限定されてしまい、全方位カメラの利点を損なうことが問題として指摘されています。
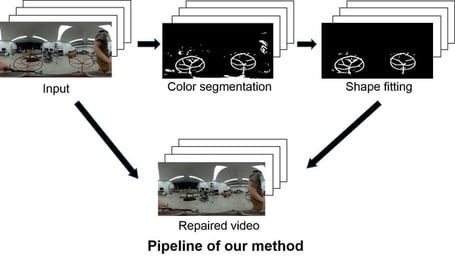
本研究では、全方位カメラを用いた際のロボット自体による遮蔽の問題に関して取り組みました。具体的には、ロボット本体の色や形状の事前知識を用いて遮蔽領域を推定し、映像の時空間情報を利用して修復する手法を提案しました。遮蔽領域の推定では、全方位映像に特有の歪みや不連続な境界が問題となりますが、遮蔽領域のおおよその形状にフィッティングすることが可能なパラメータ更新法を提案することで解決しました。実験では、屋内における複雑背景の環境で検証し、さらに実際のコンクリート橋下での実験でも有効性を確認しました。
<今後の抱負・感想>
今回このような賞をいただくことができ、大変嬉しく思っております。本研究を進めるにあたり、ご指導をいただきました淺間一教授、山下淳准教授には深く感謝申し上げます。また,様々な形でご協力いただきました研究室の皆様にも御礼申し上げます。この受賞を励みとして今後も研究活動に取り組んでいきたいと思います。