発表のポイント
◆ 従来の手法では制御が困難だった、履歴に依存する複雑な物理現象(ヒステリシス)を持つソフトアクチュエータの高精度な状態予測に成功しました。
◆ AI技術「リザバーコンピューティング」を発展させた独自フレームワーク「PhysRes」を用い、制御の障害とされてきたヒステリシス現象そのものを計算資源として活用しました。
◆ 開発した技術で、壊れやすいポテトチップスを掴むグリッパーを実装し、ロボットの身体自体が情報処理を担う新機構を実証しました。

液体相変化パウチアクチュエータとソフトグリッパの構成と動作例
概要
東京大学大学院情報理工学系研究科のタ デゥックトゥン助教と、同大学大学院工学系研究科カレメル セドリック特任助教と川原圭博教授、テキサス大学、リバプール大学らの研究グループは、ソフトロボット(注1)の駆動装置(アクチュエータ)として有望視される「液体相変化パウチアクチュエータ」の制御において、その複雑な挙動を高精度に予測する新手法を開発しました。このアクチュエータは、過去の動作履歴に挙動が左右される複雑な物理現象(ヒステリシス(注2))のため、高精度な制御が極めて困難でした。本研究では、この物理現象を逆手に取り、AI技術「リザバーコンピューティング(注3)」を応用した独自フレームワーク「PhysRes(Physical Hysteretic Reservoir)(注4)」によって、アクチュエータの変形状態をデータから高精度に予測する新手法を開発。これにより、ロボットの身体(物理系)そのものが情報処理を行うという、新しい計算アプローチを実証しました。
発表内容
背景
ポテトチップスのように脆いものや、柔らかいものを、そっと掴み上げる。そんな人間の手指のような繊細さが、これからのロボットには求められています。この課題に応えるのが、柔らかい素材で構成され、人やものと安全に触れ合えるソフトロボットです。本研究では、この次世代ロボットの「人工筋肉」として、液体を気化させてしなやかに駆動する「液体相変化パウチアクチュエータ」に着目しました。コンパクトでありながらパワフル、そして繊細な力加減を可能にするこのアクチュエータは、ソフトロボットの応用可能性を大きく広げる技術です。
しかし、その実用化には大きな壁がありました。特にこのアクチュエータは、同じ駆動条件でも時として異なる挙動を示す予測の難しさがあり、その精密な制御が大きな課題とされていました。この予測の難しさの根源は、液体が気体に変わる際の体積変化やそれに伴う変形が、過去の動作履歴に強く依存する物理現象「ヒステリシス」にあります。
研究手法と成果
この課題に対し、本研究では、この履歴に依存する複雑な物理現象を逆手に取り、アクチュエータの状態を高精度に予測する新しい手法を開発しました。
この解決の鍵となったのが、「リザバーコンピューティング」というAI技術の一分野です。特に今回用いられたのは、本研究チームが以前に考案した、独自のフレームワーク「PhysRes」です。

図1:液体相変化パウチアクチュエータの変形データ取得、状態推定、モデリングを行った。
本研究で開発されたアクチュエータは、ナイロン製のシートをパウチ状に加工し、内部に低沸点の液体を封入したものです。四隅に取り付けたペルチェ素子で加熱することで液体を気化させ、その体積膨張を駆動力とします。この一連の動作中、まず、パウチ表面に設置した複数のマーカーの三次元位置をモーションキャプチャシステムで高精度に追跡します(図1)。PhysResは、アクチュエータの動きを表す時系列の位置座標データを入力とします。この手法は、まず入力された全ての座標データを一つに連結し、「状態行列」を構築します。そして、この行列の前半部分(現在の状態)を用いて、時間的に未来にあたる後半部分を予測するようにモデルを訓練します。これにより、過去の履歴に依存するヒステリシスのような複雑な振る舞いを、現在の状態から未来を予測するという問題設定で効果的にモデルへ組み込んでいます。最終的に、この「状態」を入力として、アクチュエータの振る舞いを支配する抽象的な内部状態(潜在空間)を、単純な「線形回帰」という手法によってモデルを学習します。
開発されたモデルは、アクチュエータの動的な状態を高い精度で予測することに成功しました。これはアクチュエータの時々刻々と変化する形状を、モデルが正確に再現できることを示しています。さらに研究チームは、この技術の実用性を証明するため、開発したアクチュエータを搭載したソフトロボットグリッパーを製作しました。このグリッパーは、柔らかいまるめたティッシュや、極めて壊れやすいポテトチップスを、その形状を損なうことなく把持し、持ち上げることに成功しました(図2)。

図2:液体相変化パウチアクチュエータによる繊細なものをつかむ動作
今後の展望
本研究の意義は、単一のアクチュエータ制御技術に留まらず、ロボットの身体そのものが情報処理を担う「身体性計算」という新たな概念を具現化した点にあります。このアプローチは、将来的に、素材自体が環境を認識し、学習・判断する「計算する素材(Computational Materials)」の実現に繋がるものです。
研究チームは既に、アクチュエータが発生させる力の定量化や、触覚といった複数のセンサー情報を統合するマルチモーダル化に着手しています。これらの基礎技術を発展させることで、将来的には、壊れやすい物体を巧みに扱うソフトロボットグリッパーや、人の動きに自然に寄り添う次世代ウェアラブル機器などへの応用が期待されます。
関連情報
プロジェクトページ:
https://github.com/tatung/liquidpouch_reservoir
発表者・研究者等情報
東京大学
大学院情報理工学系研究科
タ デゥックトゥン(Tung D. Ta) 助教
大学院工学系研究科
カレメル セドリック(Cedric Caremel) 特任助教
川原 圭博(Yoshihiro Kawahara) 教授
テキサス大学
グエン カン(Nguyen Khang) 博士課程の学生
フーバー マンフレッド(Manfred Huber) 教授
リバプール大学
グエン アィン(Nguyen Anh) 准教授
学会情報
学会名:The 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025)
題 名:Modeling The States of Liquid Phase Change Pouch Actuators by Reservoir Computing
著者名:Cedric Caremel*, Khang Nguyen*, Anh Nguyen, Manfred Huber, Yoshihiro Kawahara, and Tung D. Ta, (*co-first authors)
URL: https://iros25.org/
研究助成
本研究は、「科研費「基盤研究(B)(課題番号:23H01376)」、「the Royal Society ISPF International Collaboration Awards 2023(Japan)(課題番号:ICA\R1\231067)」、「ヒロセ財団研究助成金」の支援により実施されました。
用語解説
(注1) ソフトロボット:
硬い機械部品の代わりに柔軟な素材(シリコン、フィルム、ゲルなど)を主体とするロボット。
(注2) ヒステリシス:
システムの出力が現在の入力だけでなく、過去の状態に依存する現象。
(注3) リザバーコンピューティング:
時系列データの処理に特化した機械学習手法の一つ。
(注4) PhysRes(Physical Hysteretic Reservoir):
リザバーコンピューティングの一種であり、本研究チームが以前に提案した独自の計算フレームワーク。従来のリザバーコンピューティング(Echo State Network)が、多数のノード(情報処理の単位)間の複雑な接続(再帰的な重み行列)によって短期記憶や非線形性を生み出していたのに対し、PhysResはこの重み行列を完全に排除した。その代わりに導入されたのが、「ヒステリシスエンコーディング」という、履歴依存性を模倣するシンプルな計算ルールである。具体的には、システムの現在の状態を計算する際、一つ前の状態の情報を意図的に一定量だけ遅延(レイテンシλ)させてから、新しい入力情報と組み合わせる。この「シフト(遅延)」と「ディスカード(破棄)」という操作により、情報の連鎖的な依存関係が生まれ、これがヒステリシスの持つ記憶効果を効果的に再現する。つまり、複雑なネットワーク構造を設計するのではなく、履歴を考慮したシンプルな計算ルールによって、予測に必要な複雑な動的状態を自然に生成する点が特徴。これにより、計算コストを大幅に削減しつつ、ヒステリシスを持つ物理システムの挙動を効率的にモデル化することが可能となる。
C. Caremel, Y. Kawahara, and K. Nakajima, “Hysteretic reservoir,” Phys. Rev. Appl. 22, 064045 (2024).
DOI: 10.1103/PhysRevApplied.22.064045
プレスリリース本文:PDFファイル
最も単純な「原子」ポジトロニウムをレーザー光によって1000万分の1秒で極低温にすることに成功 ―反粒子を含む原子の精密科学によって物理学の謎にせまる大きな第一歩―
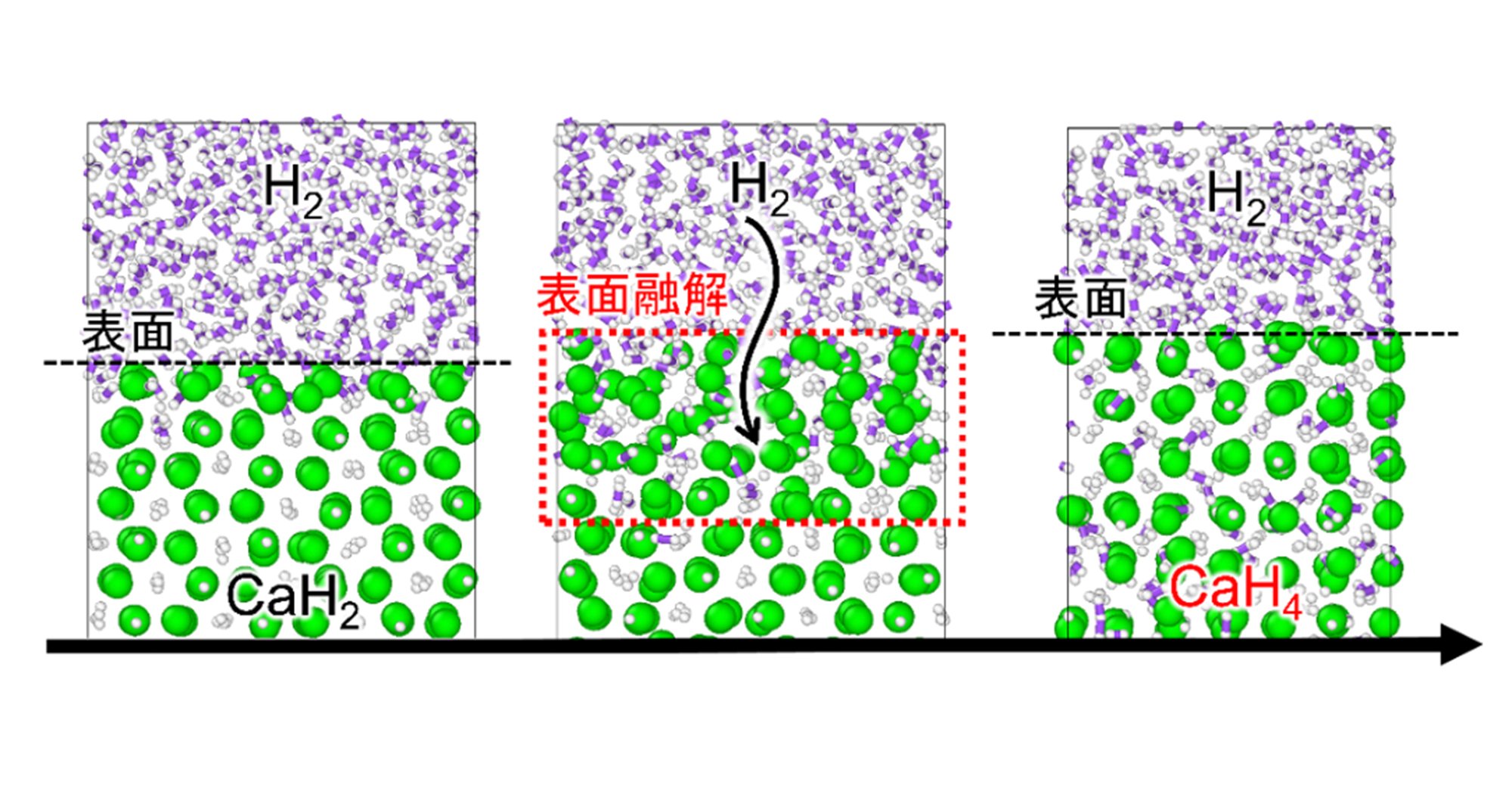
機械学習が解き明かす新たな水素化反応メカニズム ―超高密度水素貯蔵材料開発への画期的突破口―