A research group from the University of Tokyo, the University of Texas, and the University of Liverpool has developed a novel method to represent the system states of liquid phase change pouch actuators, which are promising for soft robotics. These actuators have been difficult to model due to nonlinear dynamics exhibiting hysteresis-like behavior, where the current system state depends on past actions. In this study, the researchers utilized a unique AI framework called “PhysRes,” based on reservoir computing, to turn this challenging hysteresis into a computational resource. This approach successfully predicted the actuator's deformation state with high accuracy from sensor data acquired from a soft robotic gripper the group implemented with those actuators, and capable of delicately grasping and lifting fragile objects, such as a potato chip, without causing damage. This achievement demonstrates a new computing approach paving the way for how the robot's physical body could contribute to information processing.

Papers
Conference: The 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025)
Title: Modeling The States of Liquid Phase Change Pouch Actuators by Reservoir Computing
Authors: Cedric Caremel*, Khang Nguyen*, Anh Nguyen, Manfred Huber, Yoshihiro Kawahara, and Tung D. Ta, (*co-first authors)
URL: https://iros25.org/
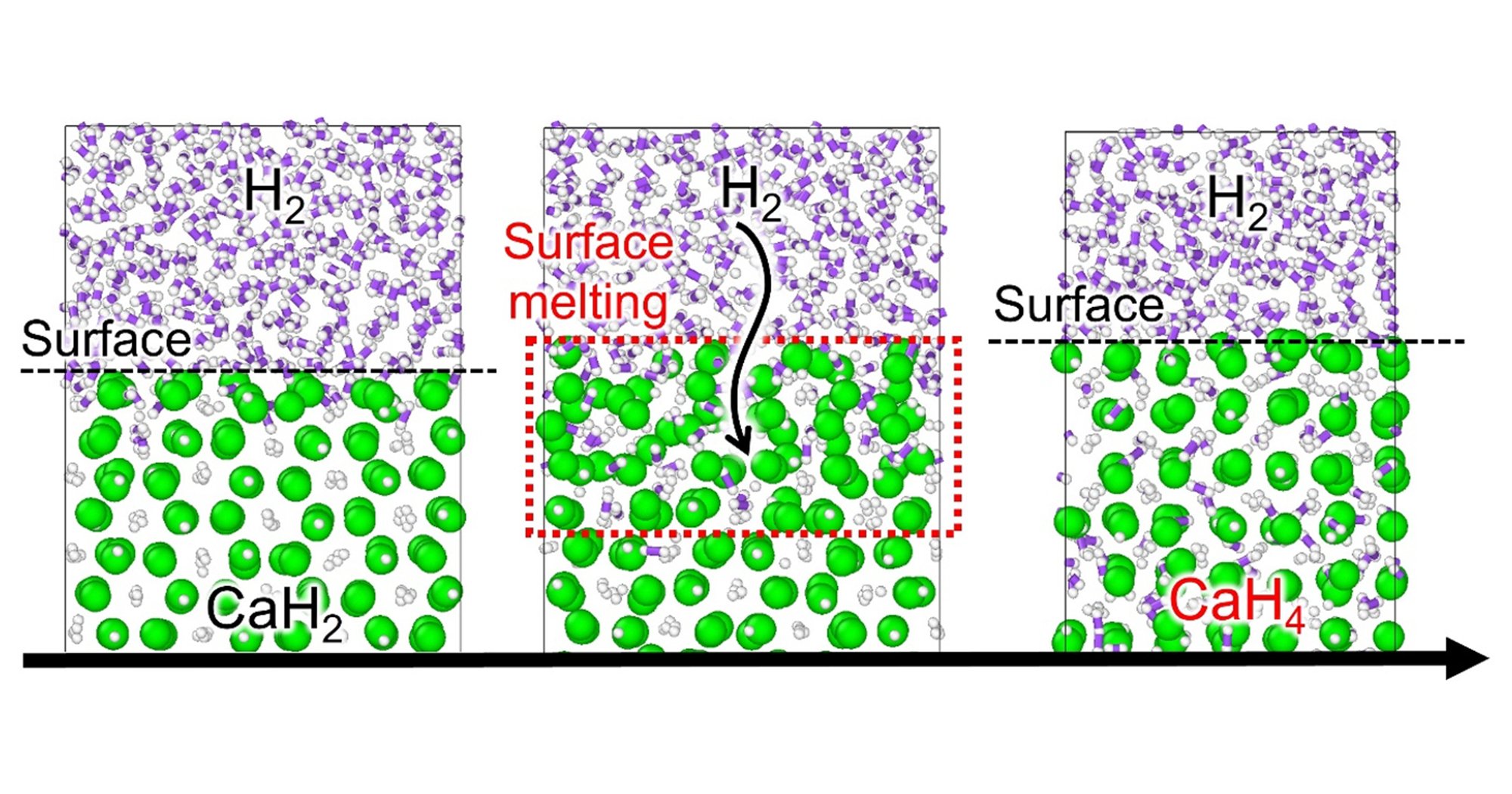
Machine Learning Reveals New Hydrogenation Reaction Mechanism: A Opportunity to Explore Ultra-High Density Hydrogen Storage Materials

Direct observation of fast atomic diffusion along ceramics grain boundary: Revealing sintering mechanism and guidelines for grain boundary engineering
