1.発表者:
李 敏赫(東京大学 大学院工学系研究科機械工学専攻 助教)
筑紫彰太(東京大学 大学院工学系研究科精密工学専攻 助教)
鈴木雄二(東京大学 大学院工学系研究科機械工学専攻 教授)
淺間 一(東京大学 大学院工学系研究科精密工学専攻 教授)
2.発表のポイント:
◆家庭用カセットボンベを燃料とした高出力の熱電発電システムを自律移動ロボットに搭載し、人の立入りが困難な環境において長時間の環境モニタリングを無人で行うことができることを実証しました。
◆70Wの高出力を実現する小型熱電発電システムを新たに開発し、位置情報センサー、カメラ、線量計などを搭載して予めプログラムされたルートに沿って長時間走行できる自律移動ロボットを構築しました。
◆カセットボンベ2本で約6時間の走行が可能であり、熱電発電システムの更なる高出力化により走行可能時間が2倍以上となることが見込まれます。低騒音なので屋内でも使用が可能であり、今後、様々な自律移動ロボットへの適用を考えていきます。
3.発表概要:
東京大学大学院工学系研究科(東京都文京区)、ダイニチ工業(株)(新潟県新潟市)、国立研究開発法人産業技術総合研究所(東京都千代田区)、(株)KELK(神奈川県平塚市)は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)の「NEDO先導研究プログラム/新産業創出新技術先導研究プログラム」のもと、自律ロボットのための革新的熱電発電システムの開発を進めてきました。このたび、70Wの高出力を実現する小型熱電発電システムを新たに開発し、位置情報センサー、カメラ、線量計などを搭載して予めプログラムされたルートに沿って長時間走行できる自律移動ロボットを構築しました。2021年7月26日に、福島県双葉郡大熊町の帰還困難区域において1.8kmの道路をおよそ1時間20分かけて自走し、長時間の環境モニタリングを無人で行うことができること実証しました。今回のシステムでは、カセットボンベ2本で約6時間の走行が可能ですが、熱電発電システムの更なる高出力化により走行可能時間が2倍以上となることが見込まれます。低騒音であり排ガスがクリーンであるため屋内でも使用が可能であり、今後、様々な自律移動ロボットへの展開を目指して研究開発を進めていきます。
4.発表内容:
自律ロボットは、社会インフラ保全、i-Construction、農林水産業、災害対応、介護・福祉用途など幅広い分野において活躍が期待されていますが、長時間駆動するための電源は実用上のアキレス腱となっていました。小型エンジンを用いた発電機では騒音が非常に大きく、また潤滑油が必要であるなどメンテナンスの面で課題がありました。SOFC(固体酸化物型燃料電池)を用いた高効率の発電システムも試作されていますが、炭素析出による触媒劣化が実用上の課題になっています。本研究では、数10Wから数100Wの小型発電機には熱電発電が最適であると考えて開発を進めてきました。
熱電発電については、これまで高ZT値(※1)の熱電材料の開発が国内外で進められてきましたが、熱設計の観点での検討が十分でありませんでした。また、燃料を用いた熱電発電システムでは、燃焼器、熱電素子、熱交換器を個別に設計して組み合わせていたので、変換効率は4%程度に留まり、可搬型熱電発電システムの正味発電出力(※2)は20W以下に留まっていました。
本研究では、保管や交換が容易であるカセットボンベ(ブタン)を燃料として用いており、新原理に基づいた燃焼器・熱交換器一体型の高出力の小型熱電発電システムの実現を目指しました。そのため、燃料と空気を混合させた後、板状の一体焼結型SiGe熱電素子(※3)に沿って導入し、触媒燃焼(※4)により高温端を直接加熱するトッパー熱電モジュールを開発しました。トッパー熱電モジュールにより、熱損失を低減しながら、高温(900℃)での高効率発電が可能です。また、その排気は、カスタムBi-Te熱電モジュールを用いた排熱回収熱電モジュールに導入されて、排熱からの発電が行われます。
本発電システムでは、発電電力の一部を、燃料・空気混合ガスのための空気供給ブロアー、燃焼ガス供給バルブ、排熱回収熱電モジュールの冷却水系などの駆動に用い、残った電力をロボットの駆動やバッテリーの充電に使用します。搭載した電源管理回路により、電力の変換は自動で行われます。
今回開発した自律移動ロボットは、GNSSセンサー(※5)から取得した自己位置に基づき、三次元LiDAR(※6)で障害物を検知し、回避しながら目標位置に移動します。目標位置に到着した場合、目標位置を更新して、新規の目標位置に移動することで自律的に環境モニタリングを行います。環境の計測のため、放射線量を計測するための線量計、周囲の状態を記録するためのRGBカメラを搭載しました。計測した放射線量は、GNSSセンサーから取得した位置と同期することで2次元マップに記録されます。
また、ロボットの動作に必要な電力は、熱電発電システムとバッテリーから供給され、熱電発電システムの出力がロボットの消費電力がよりも大きい場合はバッテリーが充電され、逆の場合はバッテリが消費されます。電力が不足にならず、かつ過剰とならないように、熱電発電システムの発電状態をロボット側で監視、発電状態に応じてロボットの速度を制御するなど、安定に長時間動作できるシステムを構築しました。
7月26日の実地走行では、福島県双葉郡大熊町の帰還困難区域において1.8kmの道路をおよそ1時間20分かけて自走し、長時間の環境モニタリングを無人で行うことができること実証しました。なお、今回の走行では、トッパー熱電モジュールは実装されておらず、正味の発電出力は70Wですが、今後トッパー熱電モジュールを取り付けることにより、130W以上の出力が得られると見込んでいます。
今回のシステムでは、カセットボンベ2本で約6時間の走行が可能ですが、上記のトッパー熱電モジュールを熱電発電システムに組み込むことによって更に高出力化・高効率化が可能であり、発電効率は10%程度に向上し、走行可能時間が2倍以上となることが見込まれます。本熱電発電システムは、低騒音かつ排ガスがクリーンであるため屋内でも使用が可能であり、バイオエタノールなどの再生可能エネルギー由来の燃料を用いることによって、カーボンニュートラルにも資するロボット用電源として位置づけることも可能です。今後、様々な自律移動ロボットへの展開を目指して研究開発を進めていきます。
5.用語解説:
※1:ZT値は、熱電材料の性能指数です。現在産業化されているBi-Te系熱電材料のZT値は最大0.8~1.0です。それ以外の熱電材料でもZT値向上のための研究が多く行われてきましたが、特殊用途を除き、実用化には至っておりません。
※2:正味発電出力は、発電出力からポンプやブロアーなどの補機の消費電力を差し引いた、ロボット側で使用可能な電力のことです。
※3:一般の熱電素子では、p型とn型の熱電素子の接合にハンダ付けが使用されおり、ハンダの融点(300℃程度)によって動作可能な上限温度が決まっていました。本研究では、p型とn型のSiGe材料を一体焼結してから加工することで、高温端にハンダ付けが不要な一体焼結型熱電素子を開発しました。これにより、900℃程度の高温でも使用することが可能となりました。
※4:触媒燃焼は、炎を出さずに貴金属ナノ粒子の表面で燃料と酸素が結合することにより、発熱する燃焼形態です。板状SiGe熱電素子に触媒層を形成し、熱電素子の高温端を900℃程度まで加熱することができます。
※5:GNSS (Global Navigation Satellite System)センサーは、人工衛星から発信された電波を使い、自分の位置を調べることができるシステムです。GPSはアメリカが開発した衛星測位システムですが、日本の準天頂衛星システム「みちびき」なども含めた総称をGNSSと呼びます。
※6:三次元LiDAR (Light Detection And Ranging)は、計測対象に複数の光を照射、反射光を計測することで計測対象の三次元形状、距離を計測するセンサーです。三次元LiDARから取得した三次元点群情報に基づき、障害物を認識、ロボットを制御することで障害物を回避します。
6.添付資料: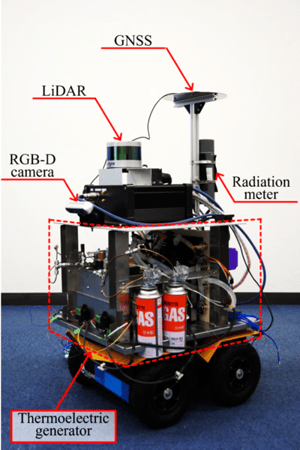
図:ロボット全体写真(上),および大熊町の帰還困難区域での走行時写真(下)
プレスリリース本文:PDFファイル