国立大学法人東京大学大学院工学系研究科(所在地:東京都文京区、研究科長:染谷隆夫)と株式会社大林組(本社:東京都港区、社長:蓮輪賢治)は共同で、福島ロボットテストフィールド(福島県南相馬市)にて、自律4足歩行ロボットとUAVを用いたトンネル断面3次元計測の実証実験を実施し、複数の断面計測を連続的かつ効率的に実施できることを確認しました。本実証実験は、国土交通省「建設現場の生産性を飛躍的に向上するための革新的技術の導入・活用に関するプロジェクト」の一環で行いました。
1 開発の背景と概要
東京大学と大林組が共同で開発した「光切断法(※1)を用いた山岳トンネル断面計測システム」は、1断面の計測の作業人員を約4分の1に、計測時間も約120分の1に省人化・省力化できる技術です。従来は、固定した三脚の上にリングレーザーと広視野カメラを設置して使用し、複数断面の計測を行う際は、その都度人が計測装置を移動させる必要があったため、手間と時間を要していました。今般、本計測装置をロボットに搭載することで、複数断面の計測を連続的かつ効率的に実施することができました。
ロボットには、15㎝以下の凸凹した不陸(ふりく)や轍(わだち)、ぬかるみや砕石上を問題なく移動できる自律4足歩行ロボット「Spot(Boston Dynamics社)」と、測量業務で幅広く使われ、カメラや計測機器などアタッチメントの改良が比較的容易なUAV「MATRICE 300 RTK(DJI社)」を採用しました。そして、積載重量制限や寸法制限を考慮し、それぞれの装置に適したリングレーザーと広視野カメラを選定しました。また、それらを固定する部材は、3Dプリンタで製作した樹脂製のものを使用して、軽量化を図りました。
2 光切断法を用いた3次元計測システムをロボットに搭載したことによる効果
(1)複数断面の3次元計測が容易に
1断面の計測は、リングレーザーのスイッチがONとOFFの状態で写真をそれぞれ1枚撮影し、背景差分法(※2)によってレーザー照射点のみを画像から自動抽出後、3次元座標(点群)を計算します。従来、複数断面の計測を行う場合は、リングレーザーの照射位置を移動させる必要がありました。本実証実験では、地上を自律歩行する「Spot」と空中を飛行するUAVに計測装置を搭載し、レーザーのスイッチの切り替えを高速で繰り返し動画撮影することで、複数断面を連続的に計測できることを確認しました。ロボットを活用することにより、計測に要する時間は従来の約30分の1に短縮できました。
(2)さまざまな場所、複雑な形状の3次元計測が可能
本システムでは、カメラの画角に収まったレーザー照射点の3次元座標を画像から計算し、取得することができます。三脚のように地上据え付け式の場合は、レーザーを照射して写真撮影できる高さに限りがあるため、ダムの利水放流トンネルや橋梁下面などの高所への適用が制限されましたが、UAVを使用することで高所での計測が可能です。
「Spot」は、背中の角度や高さを調整できるため、さまざまな角度でレーザーを照射できます。また、トンネルの掘削作業時の切羽付近は、天端(てんば)からの湧水や建設機械・車両の往来によりぬかるみや轍が発生することがありますが、「Spot」はそのような悪路にも対応できるため、掘削出来形の計測にも適用できます。
(3)自律歩行による自動計測が可能
「Spot」には複数のカメラが内蔵されており、これらのカメラはARマーカー(※3)を認識できます。事前にARマーカーを認識させ移動経路を設定すると、二回目以降は自律歩行することができます。この機能により、トンネルや地下通路を任意の時刻に自動で動画撮影しながら断面の計測ができるため、竣工検査時の初期点検や定期的な日常点検などにも有効です。
3 今後の展開
今回、ロボットに本計測装置を搭載することで、複数断面を連続的かつ効率的に計測できることを確認しました。今後は、複数断面の計測結果を統合する手法の確立を図りつつ、地下躯体内や橋梁下面での適用など、山岳トンネル以外へ適用していきます。これにより、国土交通省が進める調査・測量から維持管理・更新までの建設生産プロセス全体の生産性向上を図るi-Constructionの推進に貢献します。
※1 光切断法
直線状に光が照射される「ラインレーザー」とカメラを用い、レーザー光の進行方向とカメラの光線ベクトルの三角測量の原理により三次元計測を行う方法であり、リングレーザーと魚眼カメラを採用することでトンネル断面に適用している
※2 背景差分法
背景画像(レーザーOFFの状態)と観測画像(レーザーONの状態)を比較することによって、物体を検出する画像処理手法
※3 ARマーカー
現実空間に写真や座標などさまざまな情報を表示させるためのカメラ用目印
4 添付資料(写真)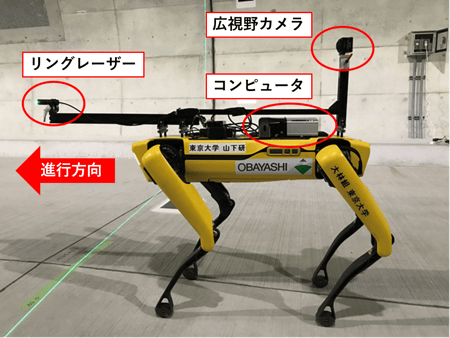 写真1 計測装置を搭載した「Spot」
写真1 計測装置を搭載した「Spot」 写真2 「Spot」の自律歩行モード
写真2 「Spot」の自律歩行モード 写真3 雪の上で背中の角度を調整した「Spot」
写真3 雪の上で背中の角度を調整した「Spot」 写真4 UAVによるトンネル断面の計測状況
写真4 UAVによるトンネル断面の計測状況
プレスリリース本文:PDFファイル
光切断法を用いた山岳トンネル断面計測システムを開発~覆工コンクリートの出来形管理の生産性を大幅に向上~
遠隔操作性と繊細な作業性を備えた建設ロボットを開発 -ImPACTタフ・ロボティクス・チャレンジによる新しい災害対応重作業ロボットの開発- :精密工学専攻 山下 淳准教授ら
