Young Researcher / 082
Lecturer Takuma Ito, Intelligent Mobility Lab.(Ito Lab.), Department of Mechanical

< Biography >
Mar. 2007 B.S. in Department of Engineering Synthesis, Faculty of Engineering, The University of Tokyo
Mar. 2009 M.S. in Department of Engineering Synthesis, School of Engineering, The University of Tokyo
Mar. 2012 Dr. Eng. in Department of Mechanical Engineering, School of Engineering, The University of Tokyo
Apr. 2010 - Mar. 2012 : JSPS Research Fellow (DC2)
Apr. 2012 - Sep. 2019 : Project Researcher in Institute of Gerontology, The University of Tokyo
Oct. 2019 -Nov. 2021 : Project Lecturer in Department of Mechanical Engineering, School of Engineering, The University of Tokyo
Dec. 2021 - Present : Lecturer in Department of Mechanical Engineering, School of Engineering, The University of Tokyo
Jan. 2023 - Sep. 2023 : Visiting Research Scholar in Mcity, The University of Michigan
< About the research >
Because Japan had become a super-aged society, providing mobility for the elderly is an important issue. Since the living environment differs between urban and rural areas, the necessary form of mobility for the elderly will also change accordingly. However, partially and fully autonomous supports of mobility operations for the elderly are commonly necessary to realize safe mobility. With this in mind, I am working on research into intelligent mobility, which has various sensors and computers. In addition to research on vehicle systems, research on the users of such mobility systems and research on the cooperation with the city are also necessary for the study of intelligent mobility. In this way, I am engaged in research on new mobility in the era of Society 5.0 from various perspectives.
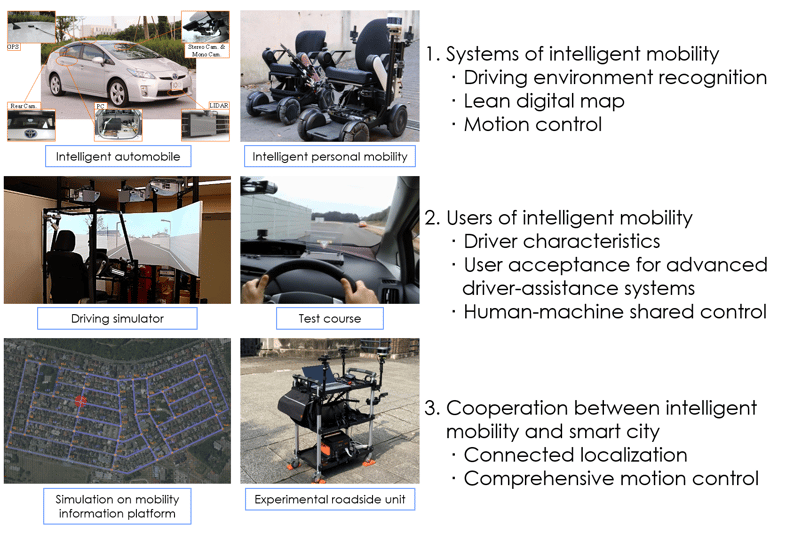
1) Research on systems of intelligent mobility
I am engaged in research on autonomous intelligent mobility such as automobiles and personal mobility. In order to realize autonomous control and advanced driver-assistance systems by intelligent mobility, it is necessary for the mobility itself to recognize driving environments. In particular, because there are no road boundary lines on community roads where traffic accidents have been occurring frequently in recent years, I am researching new driving environment recognition technologies that utilize not only conventional camera-based technologies but also LIDAR and other technologies. In addition, since intelligent systems that excessively rely on high-performance onboard sensors become obstacles for widespread use, I am also engaged in research on lean digital maps and driving environment recognition technologies based on complementary collaboration between onboard sensors and digital maps. Based on the information regarding driving environments, I am also engaged in research on vehicle motion control, such as proactive deceleration intervention control on community roads with poor visibility.
2) Research on users of intelligent mobility
While research on autonomous control of mobility is progressing, research on users of such mobility is also important for the effective use. Therefore, I am also engaged in research to understand user characteristics and to evaluate the acceptance of advanced driver-assistance systems by using driving simulators and test course. In addition, I am also engaged in research on human-machine shared control, which combines human driving with autonomous control by intelligent mobility, to realize human-initiative driving with the backup of intelligent mobility for ensuring safety.
3) Research on cooperation between intelligent mobility and smart city
In recent years, smart cities have been studied, where various sensors are installed in the city for the purpose of crime and disaster prevention. In the research field of mobility, applications in the area of mobility services are also being considered. However, in the area of vehicle motion control, the study is still insufficient. For example, mobility that are not capable of stand-alone autonomous driving can be backed up by various information resources in a smart city, enabling pseudo-autonomous driving. In addition, by utilizing information regarding the motion of surrounding pedestrians and cyclists, a new safety system is expected to be realized that comprehensively utilizes information not only from intelligent automobiles but also from various other traffic participants. In this way, I am conducting research on the cooperation between smart cities and intelligent mobility with the aim of realizing next-generation mobility safety systems.
< Future Aspirations >
Informatization in the research field of mobility is increasingly progressing in accordance with the progress of information and communication technology. By combining conventional mechanical engineering and control engineering with new technologies such as information communication technologies and AI, I hope to advance my research toward the realization of a society in which everyone can move around safely and with peace of mind.
< URL >
Intelligent Mobility Lab. (Ito Lab.): https://sites.google.com/g.ecc.u-tokyo.ac.jp/iml/ (Japanese)
Takuma Ito (reseachmap): https://researchmap.jp/takumaito1984?lang=en
*Affiliations and titles are as of the time of the interview.

Kenta Hayakawa (B4), Department of Precision Engineering, received Best Paper Award

Young Researcher: Associate Professor Hideki Fujii
