プレスリリース
- 研究
- 2022
サイエンス探求の自律化を目指した世界初のロボット・プラットフォーム―複数のロボットアームによって精密かつ器用な実験操作を実現―
1.発表者:
原田 香奈子(東京大学 大学院医学系研究科附属疾患生命工学センター/大学院工学系研究科機械工学専攻・バイオエンジニアリング専攻(兼担) 准教授)
マルケス・マリニョ・ムリロ(東京大学大学院工学系研究科機械工学専攻 助教)
2.発表のポイント:
◆人間の手で行う作業には限界があるため、科学者が思いついても試すことができない実験があり、AIロボットの活用が期待されています。
◆理化学実験で必要とされる精密かつ器用な操作を行うことを目的として、4台のロボットアームで協調作業を行う世界初の理化学実験用ロボット・プラットフォームを開発しました。
◆自律化を進め、自ら考えてサイエンス探求を行う「AIロボット科学者」の開発につなげます。
3.発表概要:
東京大学大学院医学系研究科の原田香奈子准教授と大学院工学系研究科のマルケス・マリニョ・ムリロ助教は、サイエンス探求の自律化を目指した世界初のロボット・プラットフォームを開発しました。
人間の手で行う作業には限界があるため、科学者が思いついても試すことができない実験が多く、AIやロボットの活用が期待されます。原田准教授がプロジェクトマネージャー(PM)をつとめるムーンショット型研究開発事業「人とAIロボットの創造的共進化によるサイエンス開拓」では、2050年までに自ら考えてサイエンス探求を行う「AIロボット科学者」を提案しており、科学者の身体能力を超えたロボット身体と科学者の情報処理能力を超えた頭脳としてのAIの開発に取り組んでいます。
このたび「AIロボット科学者」のロボット身体として、人間の科学者よりも精密かつ器用な実験操作を行うことができるロボット・プラットフォームを開発しました。理化学実験の支援を目的として4台のロボットアームで協調作業を行う世界初の理化学実験用ロボット・プラットフォームです。このロボット・プラットフォームにAIを統合することによって自律的なサイエンス探求を目指します。現時点では、科学者が遠隔からロボットを操作することにより精密かつ器用な実験操作を行うことができます。
本研究開発成果は、2022年10月24日~26日に、京都で開催されるロボット分野の国際学会IROS2022にて展示されます。展示では、東京に配置したプラットフォームを京都の学会会場から遠隔操作するデモを予定しています。
4.発表内容:
研究の背景・先行研究における問題点
実験科学分野におけるサイエンス探求では、「科学者が仮説を考え、その仮説を検証する戦略を考え、そして、実際の実験において対象物に作用を与えてその反応を観察し、新たな仮説や戦略を考える」というプロセスが繰り返されます。しかし、科学者の頭脳の情報処理能力や身体能力の限界により、科学者が思いついても試すことができない実験は多くあるため、ロボット技術やAI技術の活用が期待されています。
近年、ロボット技術やAI技術の実験科学分野への応用が研究されており、ラボラトリーオートメーションの高度化が期待されています。ラボラトリーオートメーションでは、科学者が事前に指示してプログラムしておいたタスクをロボットが自動で繰り返し、収集した大量のデータをAIを用いて解析する、という方法が一般的です。しかし、事前に指示できるタスクは限られ、また、既存のロボットが苦手とする技能が必要な操作、例えば、理化学実験で扱うような個体差が大きく変形しやすいサンプルなどへの精密かつ器用な実験操作を行うことができません。
研究内容
ムーンショット型研究開発事業の目標3のプロジェクト「人とAIロボットの創造的共進化によるサイエンス開拓(PM:原田香奈子)」では、2050年に科学者の同僚となるAIロボット科学者を開発することを目的として研究開発を行っており、AIロボット科学者の身体や頭脳となるロボット技術やAI技術を研究しています。
このプロジェクトの研究課題「サイエンス探求AIロボットシステム(課題推進者:原田香奈子)」においては、AIロボット科学者のロボット身体の基盤技術となるプラットフォームの開発に取り組んでおり、このたび、ロボット・プラットフォームの初号機を完成させました(図1)。4台のロボットアームで協調作業を行う理化学実験用ロボット・プラットフォームとしては世界初です。このロボット・プラットフォームの中央に対象物である実験サンプルを設置し、上部に設置したカメラで観察しながら、ロボットアームに搭載した様々な実験ツールを操作して実験を行うことができます。実験ツールの例として、現時点では、ピンセット、ハサミ、ドリル、綿棒を搭載しています。将来的にはロボット・プラットフォームがAIと統合して自律的に実験を行うことを目指しておりますが、初号機は科学者が遠隔から操作できるように設計しました。ロボット・プラットフォームの遠隔操作を通じて、科学者の実験操作における技能をAIが学習することができます。
遠隔操作においては、操作者が操作部を手で持って動かした動作を計測し、縮小してロボットによって再現します。動作倍率は1/3倍、1/10倍などの任意の値に設定でき、例えば操作者が手を10 mm動かすとロボットの先端が1 mm動くようにすることができるため、非常に精密な操作が可能になっています。微小な対象物を想定しているため、カメラの視野が非常に狭く、そのため、カメラの視野外におけるロボットアーム同士の衝突やロボットアームとその周囲の構造物との衝突を自動で回避する制御が実装されています。つまり、操作者は、視野外の安全性を心配することなく、視野内で動くロボットの操作に集中することができます。これらの技術は、同じく原田准教授がPMを務めた革新的研究開発推進プログラム(ImPACT)のプログラム「バイオニックヒューマノイドが拓く新産業革命」において開発された手術支援ロボット技術を活用することで開発されました。
プロジェクト「人とAIロボットの創造的共進化によるサイエンス開拓」では、高い技能が必要で事前にプログラムすることも困難な実験操作の例や個体差が大きく変形しやすい実験サンプルの例として、直径約1 mmの卵母細胞や直径100 μmの植物の根、小動物への精密かつ器用な操作などを想定しています。今回は、マウスに対するクラニアルウインドウ法(注1)と呼ばれる実験操作で必要なタスクを対象として、ロボット・プラットフォームの3本のアームを用いてマウスの頭蓋骨(厚さ約0.3 ~0.4 mm)をドリルで直径 8 mmの大きさに削り、ピンセットで除去するタスクに成功しました。マウスの頭蓋骨の厚さと鶏卵の卵殻の厚さがほぼ同じことから、このタスクを鶏卵を使って模擬することも可能であり、鶏卵の卵殻膜(殻の下の薄い膜)を破ることなく直径8 mmの大きさに卵殻のみを除去することも可能です。ロボット遠隔操作中に計測される画像や音、力などのデータは、AIの学習用データとして活用される予定です。
社会的意義・今後の予定
研究開発プロジェクトの他の課題推進者らは、実験結果を観察して仮説を考えるAI、実験操作を観察してマニピュレーション戦略を考えるAI、そして微細作業を行うマイクロロボットツールを開発しており、これらの要素技術をロボット・プラットフォームに統合することで自律化をすすめ、2050年にはAIロボット科学者として進化していきます。
今回の成果は、自律化を実装するためのロボット・プラットフォームとしての成果ですが、自律化がすすむ前の遠隔操作のロボットとしても理化学実験に寄与することが可能です。新型コロナウイルスの影響もあり、理化学実験に対するロボット活用のニーズも顕在化してきていますが、例えば、この遠隔操作のロボット・プラットフォームを活用すれば、ウイルスで汚染された対象物への操作を離れた場所から安全に行ったり、逆に人間が汚染源となってしまうような清潔性を保つ必要があるサンプルに対する操作も可能になります。要素技術としての社会貢献を行いながら、ムーンショット目標の達成を目指していきます。
謝辞
本開発は、東京医科歯科大学の武部貴則教授、東京大学の岡田慧教授と立命館大学の谷口忠大教授らの協力を得ました。
本研究課題は、ムーンショット型研究開発事業「人とAIロボットの創造的共進化によるサイエンス開拓(課題番号JPMJMS2033)」、およびその研究課題「サイエンス探求AIロボットシステム(課題番号JPMJMS2033-09)」の支援により実施されました。
5.発表学会:
2022年10月24日~26日に、京都で開催されるロボットの国際学会IROS2022の展示会場にて開発したロボットを用いた鶏卵の模擬タスクのデモを行います。また、プロジェクトの概要と進捗について原田香奈子准教授が基調講演にて発表します。展示では、東京に設置したロボットを京都の学会会場から遠隔操作します。
6.用語解説:
注1)クラニアルウインドウ法
免疫不全マウスの頭蓋骨を取り除いて作製した観察窓下で、脳表面上へ移植する方法。例えば、オルガノイドを移植して長期観察を行う際に実施するが、作成には熟練が必要。
7.添付資料:
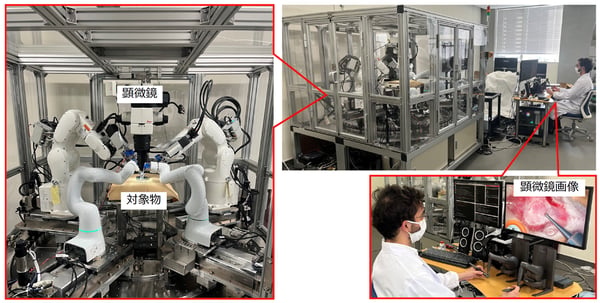
図1 開発したロボット・プラットフォーム
「人とAIロボットの創造的共進化によるサイエンス開拓(PM:原田香奈子)」におけるAIロボット科学者のビジョンを示す動画(https://youtu.be/XI-Ypt_pnds)。
プレスリリース本文:PDFファイル